
GCAN-410

GCAN-412

GCAN-413

GCAN-414

GCAN-415

GCAN-419
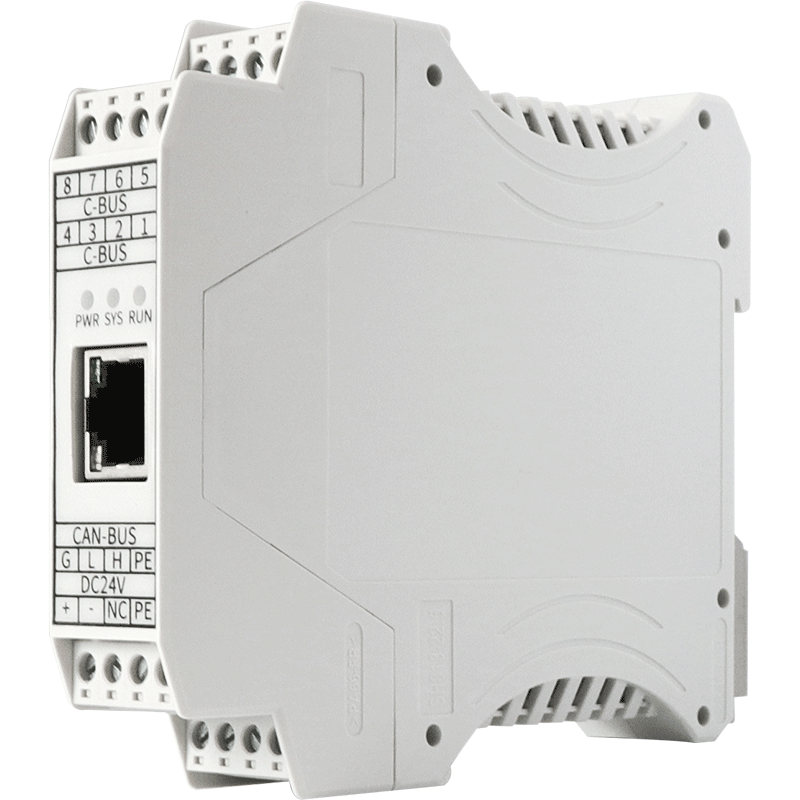
Programmable Smart Gateway series GCAN410/412/413/414/415/419
Industrial Ethernet and CAN bus data conversion Interconnection of industrial Ethernet equipment and CAN network equipment Electric power communication network Industrial control equipment High-speed, large data communication
Selection table
| GCAN-410 | GCAN-412 | GCAN-413 | GCAN-414 | GCAN-415 | GCAN-419 | |
| Number of CAN ports | 1 | 2 | 2 | 4 | 1 | 3 |
| Number of Ethernet ports | 1 | 1 | 1 | 1 | 1 | 1 |
| Number of RS232 ports | 1 | 1 | 1 | – | 1 | 1 |
| Number of RS485 ports | 1 | – | 2 | – | 1 | 2 |
| Number of WIFI ports | – | – | – | – | 1 | – |
| Number of 4G ports | – | – | – | – | 1 | – |
| DI interface | – | – | 12 | – | – | 16 |
| DO interface | – | – | 8 | – | – | – |
| Relay output interface | – | – | – | – | – | 16 |
| Support communication protocol | CANopen / SAEJ1939 / Modbus TCP / Modbus RTU | |||||
| Function | Support CANopen protocol master/slave function; support Modbus RTU/TCP master/slave function | |||||
| programming software | OpenPCS (compliant with IEC61131-3 standard) | |||||
| External power supply | DC+24V,40mA | |||||
| Electrical isolation | 1500 Vrms | |||||
| Working temperature range | -40°C~+85°C | |||||
| Working humidity range | 5%~95% RH no condensation | |||||
| Surge Immunity level | ±1KV | |||||
| isolation level | IP20 | |||||
| Installation method | Standard DIN rail mounting, specially designed for industry | |||||
Product advantages

1. Integrate three common bus interfaces
Supports simultaneous use of CAN, Ethernet, and RS232/485 buses. The GCAN-GT series programmable gateway module comes with three different types of bus interfaces. These three bus interfaces can be used at the same time, so users can flexibly convert data on each bus to other buses based on actual on-site needs.
2. Support standard communication protocols
The GCAN-GT-410 module supports a variety of standard communication protocols, such as CANopen, SAE J1939, ModbusTCP, Modbus RTU, etc. In actual use, users can directly select the function blocks of the corresponding protocol and load them for use. The addition of function blocks enables user programming The work becomes simple. Users only need to understand the basic PLC programming instructions and the characteristics and parameters of the corresponding bus protocol to develop devices similar to: Modbus TCP slave station to CANopen master station, RS485 to CANopen master/slave station, etc.
3. Easy to program and customizable
GCAN-GT-410 can be programmed using OpenPCS software, which supports five standard PLC programming languages that comply with the IEC-61131-3 standard, such as: SFC (Sequential Function Chart), LD (Ladder Diagram), FBD ( Function block), ST (Structured Text), IL (Instruction List), which makes the program highly portable and reusable, and the software also has a variety of debugging functions (such as power-off, single-step, monitoring, etc. ), making debugging the program more convenient.
Typical Application
Communication between industrial computer (Modbus RTU protocol) and CANopen (frequency converter)
Touch screen (Modbus TCP protocol) communicates with J1939 (automotive VCU)
PLC (Modbus RTU) expands CAN open interface to communicate with servo drives
Non-standard protocol conversion to standard protocol


Typical Application
Case 1:
Customer demand description:
The company needs to upgrade the control system of new energy vehicles, use PLC to replace the VCU, control and detect various distributed IO and sensor components, and finally conduct human-computer interaction through the touch screen. One requirement in this project is to control the switches of 7 solenoid valves through parameters uploaded by BMS (battery management system). But the PLC used for data processing did not have a CAN interface, so I came to our company for help. After understanding its situation, we recommended a programmable gateway solution!
Custom content description:
The programmable gateway has CAN interface, 232&485 interface and Ethernet interface. The programmable gateway can be connected to the BMS at one end and the PLC at the other end, and then independently write the communication protocol between the BMS and the PLC to directly convert the CAN bus into an interface that the PLC can recognize. The advantage of this solution is that the programmable gateway is small in size. , high adaptability, and the functions can change as the application is written.
Case 2:
Customer demand description:
It is necessary to convert the data from the vehicle VCU into canopen to connect to the ABB inverter.
Custom content description:
Take out the effective part of the VCU communication protocol and convert it into the canopen protocol and then control the operation of the inverter.
Case 3:
Customer demand description:
Convert the 1939 protocol transmitted by VCU into the canopen master station protocol for control.
Custom content description:
Using the GCAN-GT-412 module (dual CAN ports), the J1939 and CANopen master station function blocks are called respectively. Then, the required J1939 messages are intercepted from the VCU and mapped to the SDO issued by the CANopen master station, thereby controlling other CANopen slave modules.
Case 4:
Customer demand description:
Excavator bus data connected to display on touch screen
Custom content description:
Various parameter signals in the excavator are uploaded to the conversion gateway through the CAN bus for protocol analysis, and then the CAN protocol is converted into the modbus protocol and finally connected to the excavator’s display screen for various alarm displays.
Case 5:
Customer demand description:
Want to use Siemens PLC to control servo motor
Custom content description:
The modbus master protocol used through the Ethernet interface of Siemens PLC is converted into a canopen master (DS401 protocol) through the gateway to control the operation of the two motors. This module integrates modbus and canopen protocol stacks, and its function is to convert the modbus TCP slave station into a canopen master station, and then control the servo motor whose communication protocol is DS402 protocol.